Mental imagery and perceptual organization
“Filling-in” of visual perception
Visual perception is a constructive process. Previously, I studied the “filling-in” process of apparent motion.
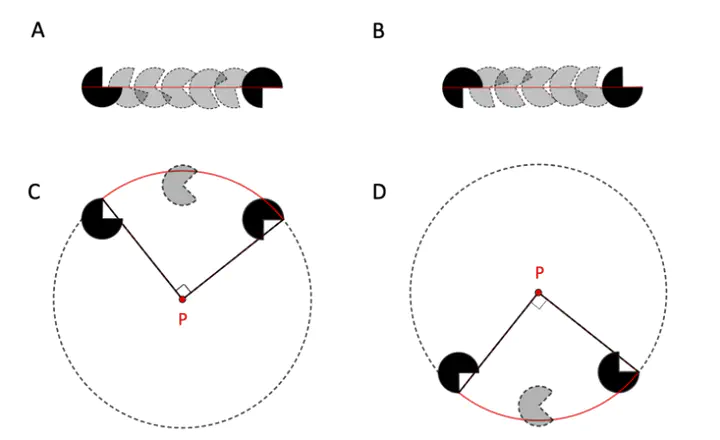
An illustration of the paths defined by Newtonian physics (A and B) and kinematic geometry (C and D) with Pacmen-shaped objects. Black Pacmen denote examples of presented stimuli, whereas gray Pacmen denote the represented intermediate step(s). The path defined by Newtonian physics is a straight line (A and B). The paths defined by kinematic geometry are curved (C and D)[[1]]. In the case of kinematic geometry, point P is the unique center of rotation for the 90° angular difference between the Pacmen. The red paths – curved upward (C) and downward (D) – are the kinematically shorter paths compared to the dashed black paths. It is important to note that although the absolute curved arcs, defined by kinematic geometry, are longer than the length of a straight path defined by Newtonian physics, the lengths of the arcs provide the kinematically shortest paths (i.e., the shortest path as defined by the unique center of rotation), given the position and angular difference of the objects.
[[1]] Paths defined by Newtonian physics involve a rigid body traversing a straight line between the two positions, along with rotation about its rectilinear translating center. That is, the resulting motion consists of uniform translation of the center of mass along a straight line together with simultaneous rotation of the object. Paths defined by kinematic geometry prescribe a motion in which the object is carried over a helical path by a single uniform screw motion around a center of rotation (Carlton & Shepard, 1990a).
Using pupillometry to investigate mental imagery
A side project explores individuals’ active imagery and potential individual differences in the vividness of imagery.